
マクニカ2月22日は、沖縄県南城市に於いて自動運転EVバスの運行と、路車協調機能を連携させた実証実験を行う。なお同実証を介して将来的には、レベル4運行で必要となるセカンダリアクティビティ( 運転手が運転中にできる運転以外の行為 )を可能にするための技術検証も実施する。
今実証実験では、ハンドル・アクセル・ブレーキペダルのない自動運転EVバスのGAUSSIN MACNICA MOBILITY社の「ARMA( アルマ )」を手動走行させる。
ARMAは、自動運転EVシステムを搭載した自動運転シャトルバス。EV( 電気自動車 )仕様で1回の充電で約9時間( 100km )の自動走行が可能。
全長:4,750mm
全高:2,650mm
全幅:2,110mm
重量:2,400kg
車両総重量:3,450kg
乗客定員:10人( 乗客9名+乗務員1名 )
動力源:EV電動モーター
最高速度:速度25km/h( 国内推奨速度20km/h未満 )
自動運転レベル:レベル2( 技術的にはレベル3相当 )

南城市を実証フィールドに据えて、地域交通の維持・確保の方策を探る他、観光客の二次交通の整備を視野に、AIカメラ・センサー等を活用したリアルタイム交通情報を活用。安全かつ効率的な遠隔監視を背景とした安全性の高い自動運転モビリティによるシステム構築を目指す。
また併せて一部区間で、同地区の実証実験では初の走行ルート内の車両周囲の道路環境情報を可視化させたインフラ連携を視野に路車協調も実証する。
より具体的には、走行ルート上に設置したカメラやセンサーにより走行ルートの状況をリアルタイムで把握。安全性を評価した上で、監視者による遠隔操作や手動運転への切り替えの判断に必要な通知を行う仕組みを構築する。
これにより自動運転走行中に、セカンダリアクティビティが可能になるための技術検証等を行う考えだ。
<自動運転EVバスと路車協調の連携図>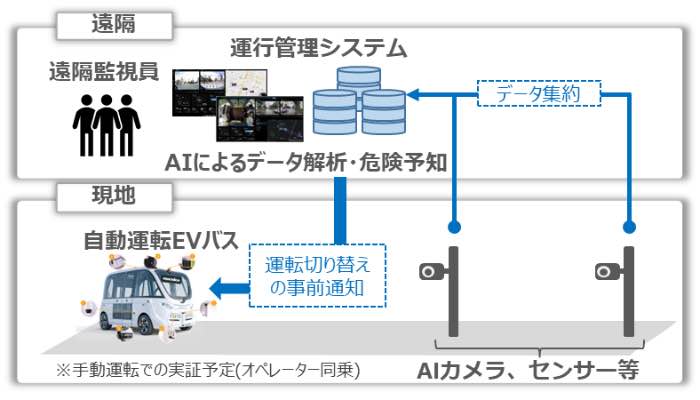
自動運転EVバスの走行情報は、マクニカ製の遠隔監視システム「everfleet( エバーフリート )」に連携させ、自動運転EVバスのリアルタイムな運行状況を離れた場所から監視・管理する。
everfleet( マクニカ製遠隔監視システム )のeverfleet( エバーフリート )は、自動運転車の実用化には、車室内の乗客や車両周辺の状況を遠隔地からモニタリングするもの。
<everfleetによる自動運転EVバスのリアルタイム運行状況>
そのeverfleet(エバーフリート)では、モビリティの位置情報や車内外のカメラ映像に加え、車速・ステアリング・バッテリー残量などの車両データを統合して一元的に可視化し、信号機などの交通インフラと協調した外部データとの連携を担う。
これにより、運行状況を遠隔地からリアルタイムに把握し、安全・安心に自動運転モビリティを運用することができるようになる。
併せて複数地域の多種多様なモビリティを同時に群管理することや運行時の異常をシステムによって自動的に検出・通知することができるため、1人の遠隔オペレータによって、効率よく自動運転モビリティを運行管理することで、オペレーションの省人化を実現し、交通採算性の改善にも貢献する。
実証実験の概要
■日程:2024年2月23日(金) ~2月29日(木)
■時間:10時00分~17時00分(1日7便)
■自動運転バス:自動運転EVバスARMA
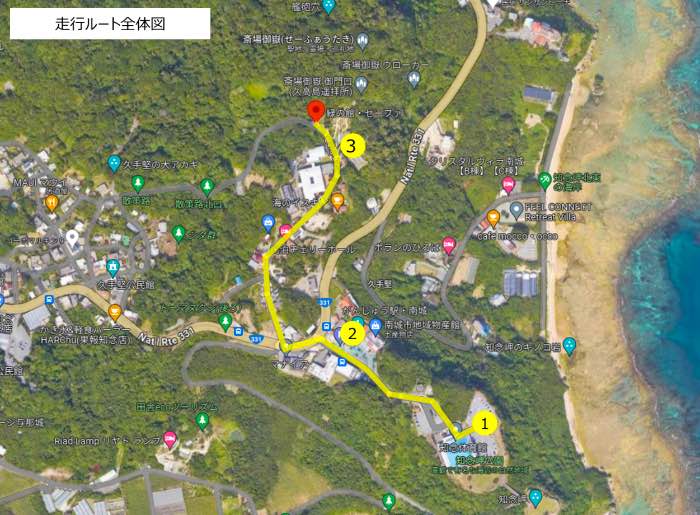
■走行ルート:知念岬公園と斎場御嶽を往復するルート
運行ダイヤ:下表の時間帯に運行
・乗車は車内(乗車中)にタブレットのアンケート回答が条件。
・交通状態や天候等による遅延や走行中止となる場合がある。
・定員が超過する場合は、乗車をお断りする場合がある。