

ContinentalとZFが、2020年の生産を予定する「NVIDIA DRIVE」ベースのL2+ソリューションを発表
NVIDIA Corporation(エヌビディアコーポレーション・本社:米国カリフォルニア州サンタクララ、社長兼 CEO : ジェンスン・フアン)はCES 2019開催前日の1月7日、世界で初めて商用利用可能なレベル2+自動運転システムの「NVIDIA DRIVE™ AutoPilot(エヌビディア・ドライブ・オートパイロット)」を発表した。(坂上 賢治)
NVIDIAによると、このドライブ・オートパイロットには複数のAIテクノロジが実装されており、これによって来年までに、監視付き自律走行車両の生産が可能になるのだという。
具体的には、自動車の大手サプライヤーContinentalとZFが、エヌビディア・ドライブをベースとしたレベル 2+の自動運転ソリューションを発表。このシステムは2020年に生産を開始する予定だ。

このシステムのベースとなったのは、レベル 2+の自動運転ソリューションであるエヌビディア・ドライブ・オートパイロットで、それは自律走行におけるワールドクラスの認識機能とコックピット内の豊富な AI 機能を組み合わせたユニークなソリューションだとNVIDIAでは話している。
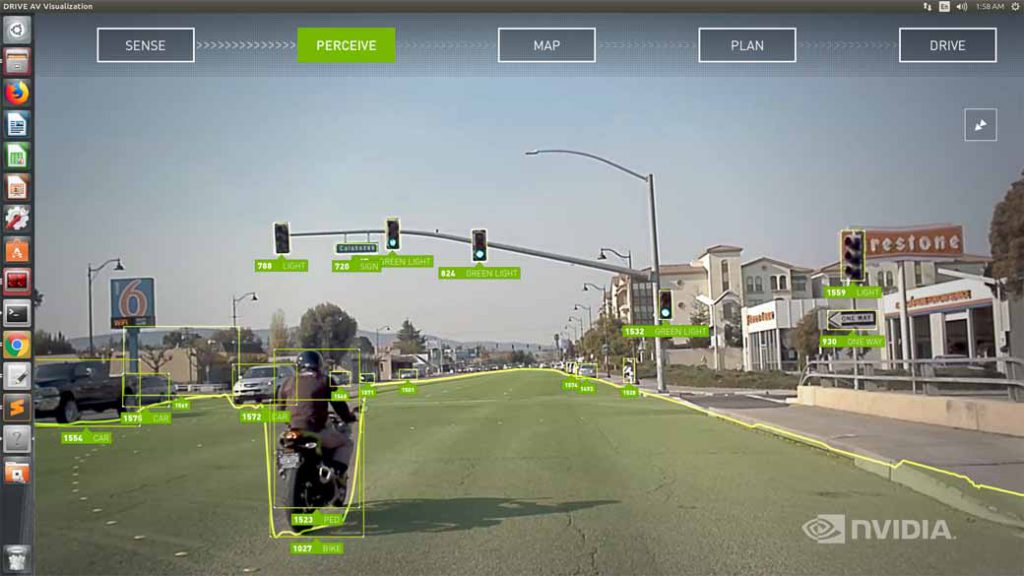
自動車メーカーは、このエヌビディア・ドライブ・オートパイロットの導入により洗練された自動運転機能の実現。並びに運転席内でのインテリジェントなアシスタント機能の実装だけでなく、可視化機能自体も車載マーケットに向けて投入することも可能になるのだという。
![]()
![]()
またこれらは現在のADASが持つ性能や機能性・路上での安全性をはるかに上回る精度を実現しているという。
同システムの完成度について、NVIDIAの自律動作マシン事業のバイスプレジデントであるロブ・チョンガー氏(Rob Csongor) は「フル装備のレベル 2+システムでは、現在、路上で使用されているものをはるかに上回るコンピューティング パワーと洗練されたソフトウェアが必要となります。
エヌビディア・ドライブ・オートパイロットは、それらの全てを提供することが可能です。これにより自動車メーカーは、2020 年までに先進の自律走行ソリューションをいち早く実装できるようになり、さらに独自開発を進めていくことで、そのソリューションの自律性を迅速に向上させることも可能になります」と語る。
さらにロブ・チョンガー氏は「エヌビディア・ドライブ・オートパイロットでは、高性能な NVIDIA Xavier™ システムオンチップ (SoC) プロセッサと、最新のNVIDIA DRIVEソフトウェアが初めて統合されており、状況認識のために車両の外側とキャビンの内側を捉える包括的なサラウンド カメラ センサーデータが、多くのディープ ニューラル ネットワーク (DNN) で処理される仕組みです。
これにより例えば高速道路での車線合流、車線変更及びパーソナル マッピングを含む、すべての自動運転オートパイロット機能が難なく実現されるようになります。
加えてキャビン内は、ドライバー モニタリングや AIコパイロット (副操縦士) 機能、車両のコンピューター ビジョン システムを用いたキャビン内で最先端の可視化機能も含まれます。
目下、NVIDIA DRIVE プラットフォームは、路上での安全性を高めながら道路を移動する上でのドライバーの疲労やストレスを軽減する自律走行車ソリューションの実現を可能とし、全世界の数百の企業に採用されています。
対してこの新しいシステムは、ロボットタクシー対応であるレベル 5 の機能を実現する、NVIDIA DRIVE AGX Pegasus システムを補完するものとなるのです」と説明した。つまり同社のエヌビディア・ドライブ・オートパイロットは、既存のレベル2のADASシステムの限界を克服するものとして開発されたのである。
ちなみに米国道路安全保険協会 (Insurance Institute for Highway Safety) の現状の調査によると、既存のレベル2のADASシステムでは車両検知が不完全であるため、カーブや急勾配の道路で車線内に車両を維持させる能力に欠けており、ドライバーによる制御が突然必要になる場面が現れる。つまりシステムのディスエンゲージメント (モード解除) が頻繁に発生するのだ。
この課題の解決についてABIリサーチの自動車調査担当バイスプレジデントのドミニク・ボンテ(Dominique Bonte) 氏は「現在のマーケットで利用されている車線維持及びアダプティブ クルーズ コントロールのシステムは、今後の消費者の期待には充分に応えられません。
しかしNVIDIAの高性能 AI ソリューションであれば、近い将来により効果的なアクティブ セーフティーと、より信頼性の高い自動運転システム登場の手助けになるでしょう」と畳み掛けた。
ハードウェア上でこのエヌビディア・ドライブ・オートパイロットの核となっているのは、毎秒30兆回(30 TOPS)の計算処理を実現する Xavier SoCである。
安全性を重視したこのXavierは、冗長性と多様性を実現する設計となっており、6種のプロセッサと90億個のトランジスタにより、リアルタイムで膨大な量のデータを処理することができる。
このXavier は世界初の自律走行用オートモーティブグレード プロセッサで、全世界の安全性についての専門家たちが「安全な製品の構築に適している」と、そのアーキテクチャと開発プロセスを評価しているという。

一方、エヌビディア・ドライブ・オートパイロットのソフトウェア スタックには、車両外の困難な状況に対処するためのDRIVE AV ソフトウェアと、車両内のタスクに対処する DRIVE IX ソフトウェアも実装されている。
DRIVE AVでは、全方位の状況認識ができるサラウンド センサーが採用されており、高精度の自己位置推定およびパス プラニング機能が装備された。
これらの機能により、エヌビディア・ドライブ・オートパイロットは、高速道路に入ってから出るまでの間、監視付きの自動運転が可能となった。
基本的なアダプティブ クルーズ コントロール、車線維持及び自動緊急ブレーキを上回るDRIVE AVの周辺認識機能により、車線が分離または合流している状況にも充分に対処でき、車線変更も安全に行えるようになっている。
加えてDRIVE AV には、DriveNet や SignNet、LaneNet、OpenRoadNet、WaitNet といった多様性と冗長性を実現するための、高度な一連の DNN テクノロジも含まれている。これによって車両は多様な物体や運転状況を認識することができるのだ。
一方、エヌビディア・ドライブ・オートパイロットは世界各国のHDマップを使った高精度な自己位置推定で、道路上での自車両の位置を明らかにするのに加えて、DRIVE AutoPilot は「My Route」と呼ばれる新しい個人向けのマッピング機能も備えた。
この機能により、以前に走行した場所が一旦記憶され、仮にHD マップがない場合でも、自動運転の経路を作成することが可能となった。
車両内では、DRIVE IX インテリジェント エクスペリエンス ソフトウェアによる乗員のモニタリングにより、ドライバーが注意散漫な状態であること、あるいは眠気を催していることが検知された場合にはアラートが送られ、必要な場合には矯正措置がとられる。
この領域のソフトウェアは、インテリジェントなユーザー エクスペリエンスを生み出すためにも使用される。このように車両が検知した周辺環境および予定されている経路が視覚的に表示されるため、システムに対する信頼が高まった。

さらに車両内で次世代のユーザー エクスペリエンスを生み出すために、DRIVE IX の AI 機能を利用して、自然言語処理、視線検出あるいはジェスチャー認識を加速させることもできている。
最後に今回Continentalでは、Premium Assistと将来の自動化機能の橋渡しとなるスケーラブルで安価な自動運転アーキテクチャを開発した。同社ではレーダー、ライダー、カメラ及び自動運転制御ユニット テクノロジのポートフォリオに NVIDIA DRIVEを活用。
このContinentalの先進ドライバー支援システム担当ヘッドであるカール・ハウプト (Karl Haupt) 氏は「先進ドライバー支援システムによる、ドライビング エクスペリエンスは新たなレベルに達しようとしています。
その結果、運転支援から自動運転への移行がシームレスに行えるようになっており、あらたな基準が定義されつつあります。
運転は積極的な旅のようなものとなり、ドライバーは責任を持ちながらも、運転時の作業を減らし、監視とリラックスだけすればいいようになるでしょう」と述べている。
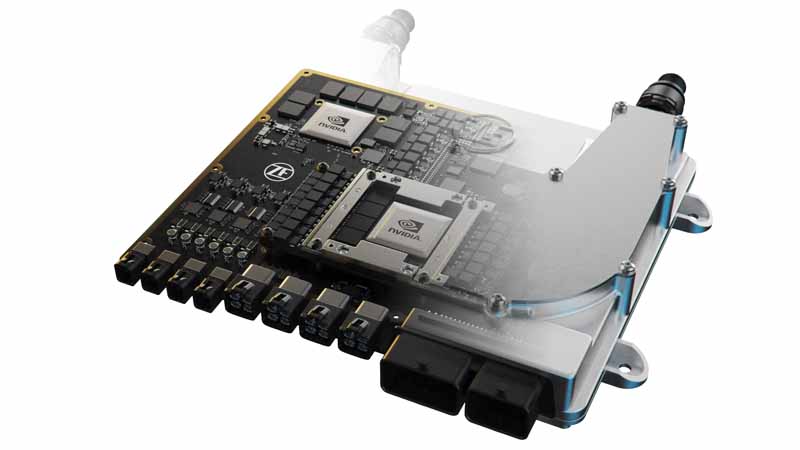
これに対してZF ProAIは、NVIDIA DRIVE XavierプロセッサとDRIVEソフトウェアを活用した独自のモジュール型ハードウェアのコンセプトとオープン ソフトウェア アーキテクチャを提供する。
ZF Advanced Engineeringの責任者でZF Zukunft Ventures GmbHのゼネラルマネージャーであるTorsten Gollewski氏は自社のアーキテクチャについて「私たちの目的は自動運転の分野で、可能な限り幅広い機能を提供することです。
ZF ProAI製品ファミリーは、ソフトウェア アルゴリズムのカスタマイズされたインテグレーションに向けたオープンプラットフォームを提供し、従来の機能とAIアルゴリズム、またNVIDIA DRIVE上で実装しているソフトウェアをサポートします」と語っている。
このNVIDIA DRIVE AutoPilot は1 月 8 日から 11 日まで、CES で公開され、ラスベガス コンベンション センターのノース ホールにあるNVIDIA ブース 6306 でデモが行われる予定である。