
情報・システム研究機構 国立情報学研究所(NII)のアーキテクチャ科学研究系 小林 努特任研究員、同研究系 蓮尾 一郎准教授らの研究チームは5月26 日、科学技術振興機構(JST)の戦略的創造研究推進事業 ERATO 蓮尾メタ数理システムデザインプロジェクト(ERATO MMSD、研究総括:NII アーキテクチャ科学研究系 准教授 蓮尾 一郎)のもと、制御システムのセンサーに計測誤差があっても、安全に動くように制御ソフトウェアのモデルを自動で変換する手法を開発したと発表した。
この手法を使うと、ソフトウェアのモデルを自動変換するとともに、出力された制御ソフトウェアが耐えられる誤差の限界を示す数式を得ることができるという。同手法は、自動運転をはじめとした外部環境とやり取りするさまざまな制御システムに対して活用でき、多様な利用環境や計測手段に対応するシステムへの応用が期待される。
なお、今回の研究プロジェクトは科学技術振興機構 戦略的創造研究推進事業 ERATO 蓮尾メタ数理システムデザインプロジェクト(JPMJER1603)の一環として行われた。同研究成果は、第13回NASA フォーマルメソッド・シンポジウムで2021年5月26日(水)にオンライン発表予定だ。
◾️論文タイトルと著者
タイトル : Robustifying Controller Specifications of Cyber-Physical Systems Against Perceptual Uncertainty
著 者: Tsutomu Kobayashi, Rick Salay, Ichiro Hasuo, Krzysztof Czarnecki, Fuyuki Ishikawa, Shin-ya Katsumata
発表会議: The 13th NASA Formal Methods Symposium
発 表 日: 2021年5月26日(水)口頭発表予定(米国東部時間
【 研究プロジェクトの背景】
近年、活用が期待され、役割の重要性が増しているドローンや自動運転などの制御システムは、適切に動作し、事故を起さないよう高い安全性が求められている。高い安全性を実現するには、数学的な手法を使って、システムをモデル化し、安全性を証明する手法が有効となる。
制御システムに含まれる制御ソフトウェアはセンサーで計測した制御対象の状態をもとに適切な動作を決定するが、現実には真の値と異なる値が計測される(計測誤差がある)ため、計測値が真の値と等しい前提で決定された制御ソフトウェアの動作は安全性を損なう可能性もある。
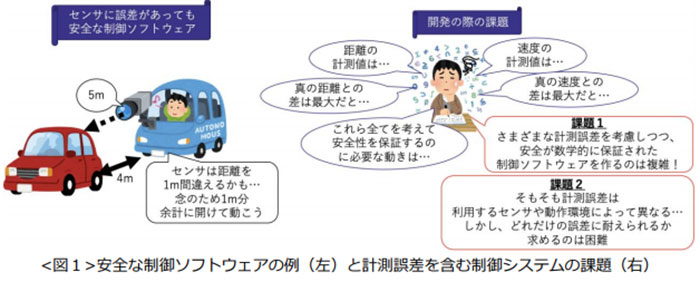
そのため、このような制御ソフトウェアを開発する際には、計測誤差を考慮して設計する必要があった。例えば、他の車の位置を計測する際に最大 1m 間違える可能性がある場合には、基本的に 1m の安全マージンを持った動作をする制御ソフトウェアとする必要がある(図1左)。
しかし、計測する対象それぞれについて真の値と計測値の両方を扱ったうえで、制御ソフトウェアのあらゆる動作において安全性が保証されると数学的に証明するには複雑さが伴うため、センサーの計測誤差を考慮した、真に安全な制御ソフトウェアの設計はとても複雑なものとなってしまう(図1右:課題1)。
さらに、制御システムの計測にどのような誤差があり得るかを確実に知ることは、設計の段階(開発の早い段階)では困難。例えば、計測誤差は制御システムが動作する環境(霧が出るか否かなど)によって異なる。
そのため、はじめから計測誤差を具体的に見込んで制御ソフトウェアの設計に組み込むのではなく計測誤差がないことを前提に作り、その制御ソフトウェアが「どの程度の誤差に耐えられるか」を計算できると、制御システム全体を柔軟に設計できるようになり、実際にシステムに搭載するセンサーを後から検討できるなどが可能だ。しかし、この「どの程度の誤差に耐えられるか」を表す数式を獲得することが難しい問題だったという(図1右:課題2)。
【研究手法・成果】
同研究では、与えられた制御ソフトウェアがセンサーの計測誤差を考慮せずに設計されたものであっても、計測誤差を考慮して安全に動作する制御ソフトウェアに自動で変換する手法を開発(図2)。
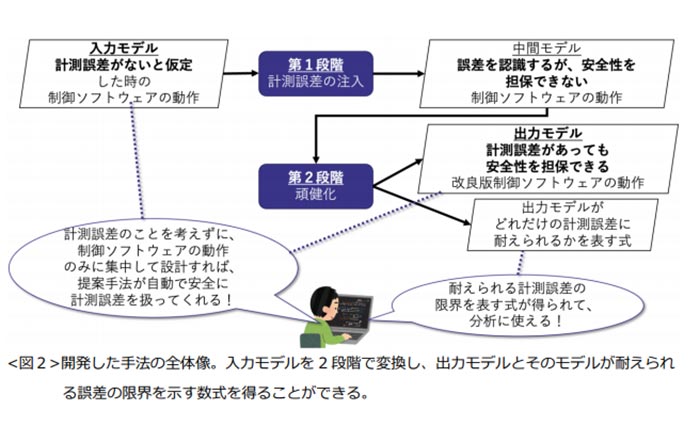
この手法では、2段階のアプローチで変換を行う。第1段階(計測誤差の注入)で、入力として与えられた制御ソフトウェアのモデルを「誤差の存在を認識し、誤差のある計測値に基づいて動作するが、元の制御ソフトウェアと同じ動作をするため安全性を担保できない制御ソフトウェア」のモデルに変換する。
そして、第2段階(頑健化)で、第1段階で得られた誤差を認識するが安全性が担保できない制御ソフトウェアのモデルを、「誤差のある計測値に基づいて元のソフトウェアとは違って適切に動作し、安全性を担保できる制御ソフトウェア」のモデルに変換する。そして、この変換後のモデルにより表される制御ソフトウェアが耐えられる誤差の限界も数式として出力する(図2)。
具体的には、第1段階(計測誤差の注入)では、制御ソフトウェアのモデルに、誤差を含んだ計測値に対応する変数を新しく導入。
また、入力として与えられた誤差を考慮しない制御ソフトウェアは、動作を決定する際に制御対象の真の値を参照できるかのような非現実的な記述がされているのに対し、第1段階の処理では、制御対象の値を、現実を反映した(真の値ではない)計測値として参照するような記述に変更する。
第1段階の処理の後では、制御ソフトウェアは計測値をもとに動作するが、動作は元の制御ソフトウェアと全く同じなため、一般に安全性は保証できない。例えば、自動運転車が、4m 前にいる別の車との距離を 5m と間違えて動いた結果追突する、といったことが起こりうる。
第2段階(頑健化)では、まず、制御ソフトウェアが想定している制御対象の状態に応じた場合分けを、誤差を考慮して実施する。
例えば、自車の前に車がいる状況で、ブレーキをかけるべき距離なのか、そのままの速度で走行して良い距離なのか、誤差があるせいで判断しかねる場合について、同手法ではこのような場合を特別に扱うために、どのような「判断しかねる」状況があり得るかを算出する。さらに、動作を適切に変更することで、制御ソフトウェアが安全性を担保できるようにする。
ここでは、計測値から算出した真の値のあらゆる可能性を考慮し、真の値がどのような値であっても安全であるような動作を算出する。
この手法で変換された制御ソフトウェアは、計測誤差があっても安全であるような動作が記述されたもの。しかし、計測誤差があまりにも大きいなど、そもそも安全な動作を取ることが理論上不可能な場合もある。
従って、「得られた制御ソフトウェアが耐えられる誤差の限界はどこか?」という問題が生じるわけだが、同手法では、この耐えられる誤差の限界も数式として出力する。これにより、制御システムに搭載可能なセンサーの選定や、制御ソフトウェアを他のコンポーネントと組み合わせた際の誤差に関する分析を体系的に行うことが容易となる。
これらの手法により、計測誤差がある場合でも安全に動作する制御システムの設計が体系的で、かつ容易になるほか、様々な計測誤差に対して制御ソフトウェア動作の柔軟な分析・対応が容易になり、様々な制御システムに囲まれた我々の社会の安全性向上に貢献できるという。
【今後の展望】
同手法は、外部環境とやり取りする様々な制御システムに対して活用可能だという。研究チームでは、今後は手法をさらに一般化していき、数値の誤差に限らず、物体認識システムが一定の確率で対象を正しくない物体として認識してしまう場合など、多様なシステムの安全性に寄与できるようにすることを目指すとしている。
◾️小林特任研究員からのコメント:
「多くのソフトウェアシステムは外部環境とやり取りを行うことで人の役に立つものであり、これらのシステムとその安全性が今後ますます重要になっていくことは間違いありません。
本研究は、環境とのやり取りについて回る「理想と現実の差」を引き受け、開発者が誤差の細部に惑わされずに制御ソフトウェアの本質的な部分に集中できるようにすることで、現実での安全性を数学的に保証する開発を促進するものであり、有用であると共に今後の大きな発展も期待できるものであると考えています。
今後も産業界での適用を見据え、数学的で厳密な手法をより現実に使いやすくする研究開発を行っていきたいと考えています。」