トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(以下、TRI-AD)は、パートナー企業と、自動運転用の一般道高精度地図生成に関する複数の実証実験を実施し、自動運転に必要な相対精度(50cm程度以下)の地図生成が可能であることを確認した。

従来コストがかかるため、広範囲での網羅が難しく自動車専用道路に限られていた高精度地図生成に対する効果的な手法を追及してきたTRI-ADは、今回の実証実験で、以下の2点を検証し、いずれも高精度地図生成に有効であるという結果を得た。
1.専用の計測車両を使用せずに、衛星や一般車両から得られる画像データなどを元にして、自動運転用の地図情報を生成する。
2.TRI-ADの自動地図生成プラットフォーム「Automated Mapping Platform(以下、AMP)上の車両データのデータ形式を変換し、アルゴリズムを補正することにより、他社のプラットフォームで活用する。
TRI-ADは、これらの実験成果を活用することで、自動運転用地図の更新期間の短縮、エリアの拡大、作成および維持コストの大幅な削減が期待できるとしている。
[各実験の概要]
■高解像の衛星画像を用いた道路地図自動生成
TRI-ADは、宇宙技術ソリューションを手掛ける「マクサー・テクノロジーズ社(以下、Maxar)」、「NTTデータ」と、昨年4月25日から3社合同で高解像の衛星画像を用いた自動運転用高精度地図の自動生成に向けた実証実験を行った。
その中で、衛星画像に写る自動車や影、建物の倒れこみによる遮閉などの地図以外の要素を自動で解析、除去、補正することで、必要な地図情報を自動抽出することに成功。東京23区と海外6都市で、自動運転制御に活用できる相対精度(25cm程度/※1)の地図生成を実現し、自動運転用地図として有用であることを確認した(図1~3参照)。
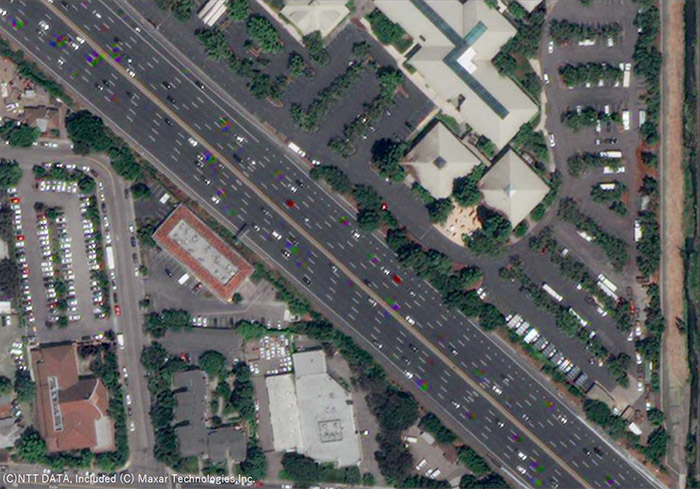
図1.衛星画像(海外)

図2.自動車等の除去と画像補正

図3.地図情報抽出
■ドライブレコーダーを用いた道路地図自動生成
TRI-ADは、道路インテリジェンスのプラットフォームを提供する「CARMERA」と、東京23区と米国2都市で、一般車両にも搭載可能なドライブレコーダーを使用した自動地図生成技術の検証を行った。
この中で、ドライブレコーダーのデータのみで自動運転に必要な相対精度(40cm程度/※1)の地図生成に成功。CARMERAのReal-Time Events and Change Management engineと同じマシンラーニング技術などを使用することで、自動運転に必要な最新情報を判別し、HDマッピング・システムに送信、更新することが数分でできるようになる。
これにより、AI認識に必要な画像データを収集し、幅広いエリアの地図生成の可能性を実証した。
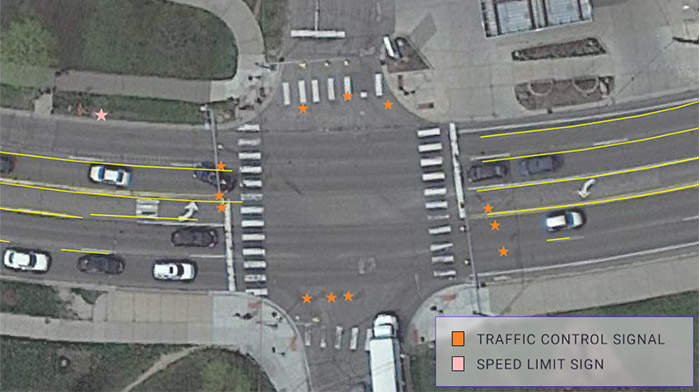
図4.郊外道路の標識配置マップ
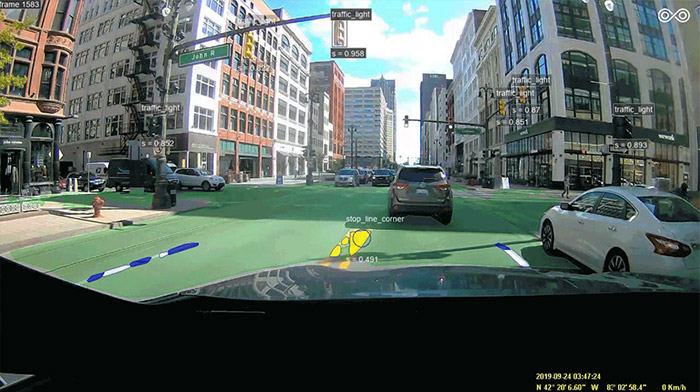
図5.都会の道路レベルの特徴点検知
■TomTom用の地図生成
TRI-ADは、位置特定技術を手掛ける「TomTom International(以下、TomTom)」と新たな実証実験を行った。
その中で、TRI-ADが集めたAMPの車両データの信頼性を検証し、TomTomのクラウドベースの地図生成プラットフォーム用にデータ形式を変換し、TomTom独自のアルゴリズムを活用して入力することで、自動運転に必要な車線情報を含む一般道高精度地図の生成と更新に成功した。
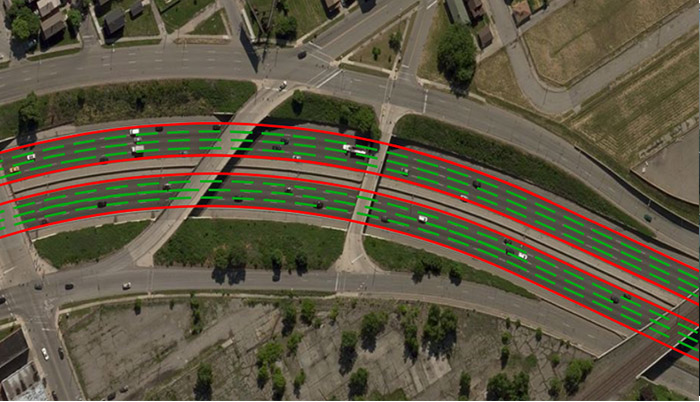
図6.高精度地図上でのレーンマーク
■HERE用の地図生成
TRI-ADは、位置情報データおよび位置情報技術のプラットフォームを提供する「HERE Technologies(以下、HERE)」との共同実証実験を行った。
共同実証実験では、TRI-ADの車両データの位置誤差をHEREの高度セルフヒーリング技術で補正することで、自動運転に必要な車線情報を含む一般道高精度地図の生成に成功。車両データをHERE Platformに入力することで、HERE独自のアルゴリズムで高精度の一般道地図を自動生成することができた。
なお、同社のHD Live Mapは、既に世界有数の自動車メーカーのレベル3自動運転開発プログラムに採用されている。
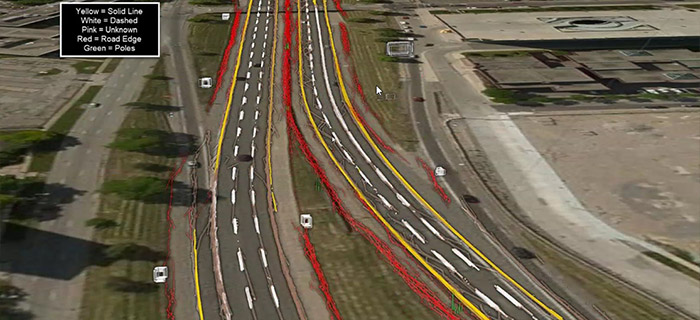
図7.自動生成された高精度地図
TRI-AD Automated Driving Strategy and MappingのVice Presidentのマンダリ・カレシー氏は、以下のように話している。
「Maxar、NTTデータとCARMERAとのこれまでの実証実験の成果および、新たな実証実験パートナーであるTomTom、HEREとの成果を発表できることを、大変嬉しく思います。人々にとって自動運転がより安全で身近な技術となる未来にまた一歩近づきました。さらに精度を向上させるため、今後もパートナー企業との連携を進めて参ります」。
[実証実験参加企業について]
<TRI-AD>
TRI-ADは、2018年3月に東京に設立された、自動運転に関連する新しい技術と、先進的で安全なシステムを開発する企業。トヨタが新たに発表したWoven Cityにおいても、スマートシティのデザイン、コネクテッドモビリティ、ロボティクスの技術をトヨタやパートナー企業と共にと実証していく。
■TRI-AD:https://www.tri-ad.global/jp/home
<マクサー・テクノロジーズ社>
マクサー・テクノロジーズ社は、日本を含む全世界30カ国以上の拠点における約5,800人のチームメンバー持つ、アース・インテリジェンスと宇宙インフラ関連分野におけるイノベーター。
常に変化する地球の監視を通じて、状況の理解から判断への誘導支援を行うなど、政府および民間の顧客に価値あるソリューションを提供するほか、全世界を対象としたブロードバンド通信環境の提供や、宇宙環境の活用促進などを実施している。
■Maxar:https://www.maxar.com/
<NTTデータ>
NTTデータは、世界50ヵ国以上でコンサルティングからシステムづくり、システムの運用に至るまで、さまざまなITサービスを提供している。また、NTTデータの衛星画像付加価値ソリューション「AW3D」では、全世界を対象に、三次元地図を提供している。
■NTTデータ:https://www.nttdata.com/jp/ja/
■AW3D:http://www.aw3d.jp/
<CARMERA>
CARMERAは、ニューヨークとシアトルに本社を構え、サンフランシスコ、ロンドン、デトロイト、ソウル、東京にサテライトオフィスを置く、車載カメラのクラウドソーシングデータのみを活用して、従来の1/100のコストを実現するロードインテリジェンス企業。
北米、ヨーロッパ、中東、アフリカ、アジアの大手自動車OEMメーカーおよびMobility as a Service(MaaS)企業と協力し、各特定のセンサーやフォーマットにとらわれないアプローチ、モジュール式マップの作成およびメンテナンスにより、レベル2(ドライバー主体)からレベル4(AIシステム主体)の自動運転技術をサポート。近年はGV(旧Google Ventures)主導のベンチャーバックアップを受けている。
■CARMERA:https://www.carmera.com/
<TomTom>
トムトム(TomTom)は、アムステルダムに本社を置き30カ国に拠点が持つ、高精細な地図情報、ナビゲーションソフトウェア、リアルタイム交通情報やサービスによってモビリティを形作る独立系の位置情報テクノロジーの専門企業。
■TomTom:https://www.tomtom.com/ja_jp/
<HERE>
HEREは、都市のインフラ運営から企業の資産最適化、ドライバーの安全な目的地到着まで、位置情報データおよび位置情報技術のプラットフォームを提供する企業。
■HERE:https://www.here.com/
■HERE360:http://360.here.com
※1:本実証実験の対象地区のうち、データ精度の良好な一部条件においての参考値。